
pinboard:hank
Table of Contents
LEGO Hank
Description
This robot is a modified version of the one describe in the great book “The Unofficial Guide to Lego Mindstorms Robots” by Jonathan B. Knudsen & Markus L. Noga.
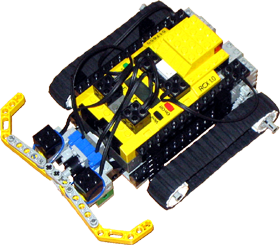
The original robot has only two frontside bumpers. This modified version has two frontside bumpers along to two frontside lightsensors. So this robot can follow a line and react to obstacles in the way the same time.
The solution to the problem of the missing sensorinput on the rcx is very easy: One bumper and one lightsensor share one input. This input has to be configured to handle a lightsensor. Than it's possible to read the bumper as something very bright in front of the lightsensor.
For example, the value of the lightsensor:
| 35 | something black |
| 49 | something white |
| 100 | active bumper |
Movie
pinboard/hank.txt · Last modified: 2023-12-28 08:50 by martin